Learn to program the VEX EDR Cortex in ROBOTC Text
NOTICE: On 8/18/2021, Amazon AWS permanently discontinued support for network protocols used by Robot Virtual Worlds and Expedition Atlantis. These products are no longer able to communicate with CS2N. Please see this article for details.
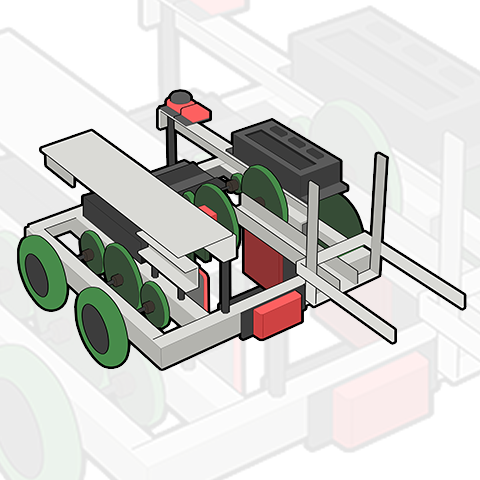
The VEX Cortex Video Trainer provides a structured sequence of programming activities. The activities are designed to get students thinking about the patterns and structure of not just robotics, but also programming and problem-solving more generally. This curriculum includes videos, animations, and step-by-step lessons designed to help beginners learn behavior-based programming using the VEX Cortex hardware and ROBOTC Text programming software.
The VEX Cortex Video Trainer provides a structured sequence of programming activities. The activities are designed to get students thinking about the patterns and structure of not just robotics, but also programming and problem-solving more generally. This curriculum includes videos, animations, and step-by-step lessons designed to help beginners learn behavior-based programming using the VEX Cortex hardware and ROBOTC Text programming software.
Additional Resources
VEX EDR Fundamentals
Robots are designed to solve specific problems, in specific ways. For this badge, you will learn more about your role as the Programmer, along with some guidelines and tips when using ROBOTC.

VEX EDR Setup
In order to begin programming, you will need to install ROBOTC, build a robot, load the robot with the proper firmware to run ROBOTC programs, and then make sure it all works by downloading and running a sample program on the robot.

VEX EDR Movement
Your first project-based challenge will be a maze called "The Labyrinth". Successful completion of this challenge will require a thorough understanding of the movement behaviors and commands available in ROBOTC.

VEX EDR Remote Control
One powerful feature of the VEX EDR is its ability to be driven using the VEXnet Remote Control, in addition to being a fully capable, autonomous robot. This ability will prove to be indispensable in situations where direct human input is crucial. In this section, you will learn how to program your robot to react to input from the VEXnet Remote Control.

VEX EDR Sensing - Educators ed.